
世界初、HDR力覚センサーを搭載した組み立てロボットを開発 ―微小な力加減を持つことで、傷つきやすい樹脂素材なども組み立て可能― (大学院理工学研究科 辻 俊明 准教授)
2019/12/12
NEDOと埼玉大学は、(株)興電舎、(株)ワコーテックの協力を得て、世界で初めてハイダイナミックレンジ(HDR)力覚センサーを用いた組み立てロボットの開発に成功しました。
今回、従来比10倍となる10g重から20kg重までの力の検出範囲(ダイナミックレンジ)を持つセンサーと、微小な力感覚を認識する人工知能(AI)技術を新たに開発し、それらを搭載したことで、ロボットが微小な力を調整しながら繊細な組み立て作業を行えるようになりました。
本ロボットによって、傷つきやすい樹脂素材などの対象物でも力を抑えて組み立てられるほか、組み立て動作の完了を知らせるクリック動作も検知でき、ロボットによる組み立て作業の高度化が期待できます。
なお、埼玉大学は、今回開発した組み立てロボットを、12月18日から12月21日まで東京ビッグサイトで開催される「2019国際ロボット展(iREX2019)」に出展します。
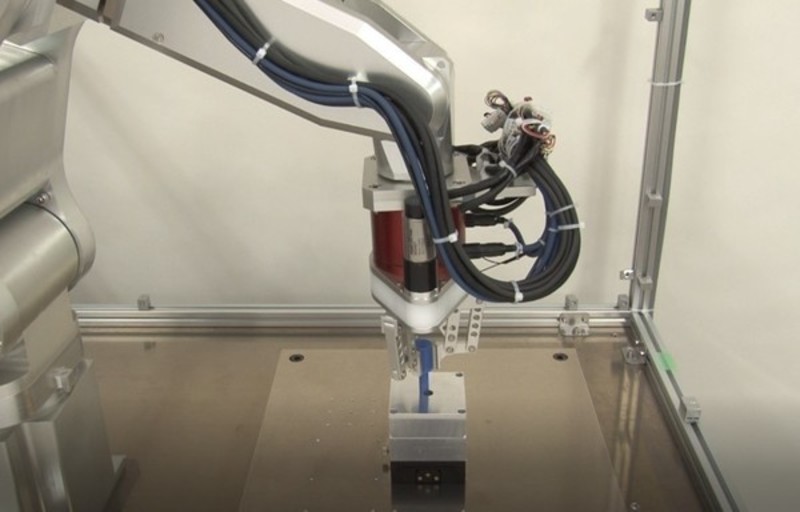
図1 HDR力覚センサーを用いた組み立てロボット (動画)https://youtu.be/_MhhfgEAxsI![]()
1.概要
近年、力覚センサーを搭載することで力加減を調整しながら高度な組み立てを実現するロボットが増えています。しかし、力覚センサーの検出範囲(ダイナミックレンジ※1)が狭いために微小な力を計測できず、細やかな力加減ができないことが大きな課題となっています。そのため、産業分野で省力化を進める上では、高性能な力覚センサーを使った組み立てロボットの開発と導入が期待されています。
そこで、国立研究開発法人新エネルギー?産業技術総合開発機構(NEDO)と老虎机游戏埼玉大学は、2018年度から、高次組み立て動作の自動化を目的に、ハイダイナミックレンジ(HDR)運動解析技術に基づく組み立てロボットの研究開発プロジェクト※2を開始しました。その中で、株式会社ワコーテックと協力し、微小な力から大きな力まで広い範囲で検出できるHDR力覚センサーを開発し、さらに株式会社興電舎の協力も得ることで、今般、同センサーを用いた組み立てロボットの開発に成功しました。HDR力覚センサーを搭載した組み立てロボットは世界初となります。
本ロボットは、従来の商用力覚センサーと比べて10倍となる、10g重から20kg重までの力の検出範囲を持ちます。従来の10分の1の[NEDO1] [NEDO2] 力まで検知できることで、樹脂素材のような傷つきやすい対象物でも、力を抑えて組み立てられます。また、微細な力情報に基づく機械学習[NEDO3] [NEDO4] を用いた人工知能(AI)技術で組み立ての状態を正確に認識できるようになり、より高度な組み立て作業が可能です。例えば、組み立て終えた時に振動が発生し、カチッと音がするクリック動作を伴う組み立ての場合には、その振動を力で検知することで、ロボットが組み立ての成功をより認識し、作業の信頼性向上を実現します。これにより、従来のロボットの力覚センサーで行える作業に加え、繊細な力加減が必要な作業へとロボットの適用範囲を拡張することが可能になります。
今後は、特に樹脂素材や割れやすい素材の組み立て、および複数の手順で構成されるような複雑な組み立てに本技術を応用する予定です。
なお、埼玉大学は、今回開発した組み立てロボットを、12月18日から12月21日まで東京ビッグサイトで開催される「2019国際ロボット展(iREX2019)※3」に出展します。
2.今回の成果
【1】従来比10倍のダイナミックレンジを持つ力覚センサーとロボットによる繊細な力覚検知の実現
今回開発したHDRセンサーは、レンジの異なる起歪体を組み合わせた独自の多段型構造を導入したことで、従来の商用センサーと比べて10倍のダイナミックレンジを持ち、10g重から20kg重の力まで検出できます。このセンサーを搭載したロボットは極めて敏感な力感覚を持っているので、羽根のような繊細なものを使ってロボットに触れてもそれを検知できます。30kgの重量のロボットでありながら羽根1枚で操作することができます。

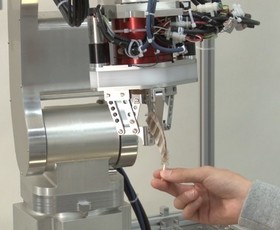
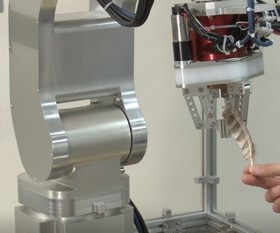
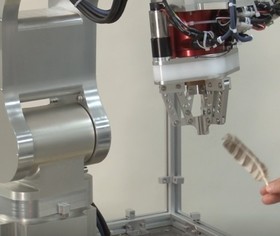
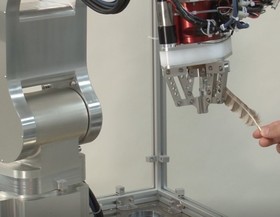
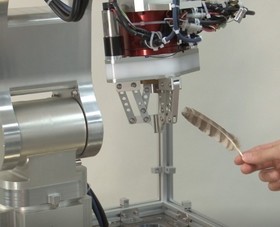
図2 羽根で触れた力(約10g重)に倣った動作 (動画)https://youtu.be/4MZVGqmKd_M![]()
【2】繊細な力感覚を用いた組み立ての実現
【1】の技術を用いて組み立て動作を実現しました。ペグインホール動作※4において、従来はプラスチックのような傷つきやすい素材のものを組み立てることは困難でしたが、今回、従来比10分の1の力まで検知できることで傷つかない微小な力で触れながら組み立てられるようになりました。
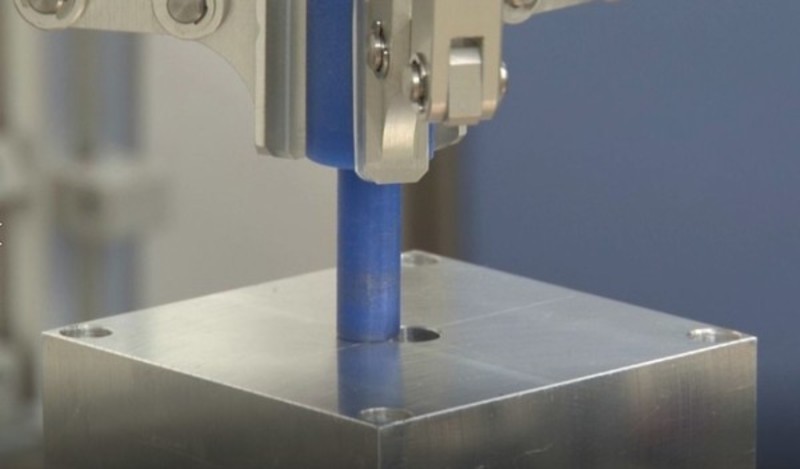
図3 樹脂素材の組み立て作業 (動画)https://youtu.be/wMY94l8F_WU![]()
【3】微小な力感覚を認識するAI技術による組み立て作業の信頼性向上
ロボットの精度に対する要求仕様が高い蓋の組み付けなどの高度な組み立て作業では、成功率を高めるためには、作業が成功したか否かを認識し、失敗時には作業をやり直すことで成功率を高められます。そこで今回、力覚検知技術を用いて作業の成功を示すクリック動作を検知し、作業の成否判定に利用する人工知能(AI)技術を開発しました。AIの深層学習により、組み立て作業が成功しなかった場合には動作を微修正してやり直すことで高度な組み立て動作の信頼性を大きく高められます。
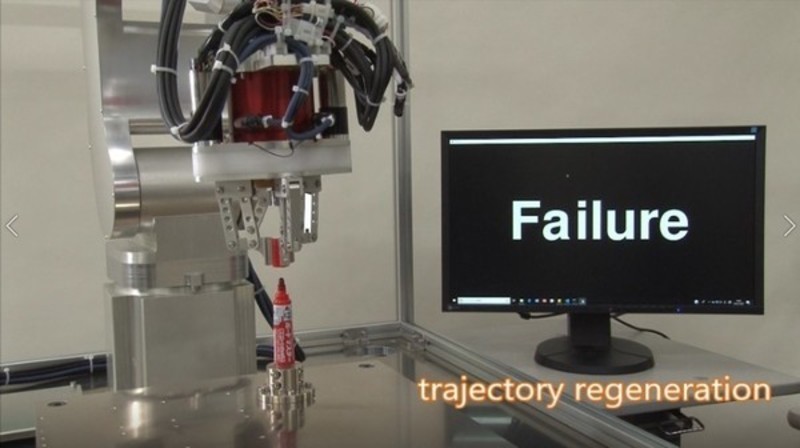
図4 作業失敗後にやり直すロボット (動画) https://youtu.be/NcrDOUlbiGg ![]()
【4】ロボットの剛性を自動調整するAI技術に基づく高度な組み立て作業の実現
人間は繊細に力加減を調整できるようにするために体の剛性を調整していることが知られています。この知見に基づき、今回、組み立て作業に適したロボットの剛性を強化学習で自律的に学習するAI技術を開発し、搭載しました。過去の動作から学ぶことにより、高度な組み立て動作でも繊細で迅速に力を調整できます。
【注釈】
※1 ダイナミックレンジ
センサーが検知できる最小の値から最大の値までの幅を表します。力覚センサーの場合は作業で検知できる最大値と最小値の幅があるため、大きな力を検知できると繊細な力は検知できなくなります。逆に繊細な力を検知できるセンサーは大きな力は検知できません。また、レンジの異なるセンサーデバイスの応答を組み合わせて広い幅のダイナミックレンジを取得する機能を持ったものをハイダイナミックレンジセンサーと呼びます。より広いダイナミックレンジを持つ力覚センサーにより対応能力の向上が期待されます。
※2 本プロジェクト
事業名:次世代人工知能?ロボット中核技術開発/次世代人工知能技術の日米共同研究開発/HDR運動解析技術に基づく組立てロボットの研究開発
実施期間:2018年度~2019年度
※3 2019国際ロボット展
会場:東京ビッグサイト 青海?西?南ホール
開催期間:2019年12月18日(水)~21日(土)
ウェブサイト:https://biz.nikkan.co.jp/eve/irex/![]()
※4 ペグインホール動作
棒の形状をした部材を同サイズの穴に挿入する動作のことです。組立動作の多くがこのペグインホール動作に基づくものであり、高度な組立をする上での最も基礎をなすため、しばしば組立ロボットのベンチマークに使われています。
3.問い合わせ先
(本ニュースリリースの内容についての問い合わせ先)
NEDO ロボット?AI部 担当:渡邊、鈴木 TEL:044-520-5242 E-mail:project_nichibei@nedo.go.jp
埼玉大学 担当:辻 TEL:048-858-3467
(その他NEDO事業についての一般的な問い合わせ先)
NEDO 広報部 担当:佐藤、坂本、中里 TEL:044-520-5151 E-mail:nedo_press@ml.nedo.go.jp
(その他埼玉大学についての一般的な問い合わせ先)
埼玉大学 広報渉外室 TEL:048-858-3932 E-mail:koho@gr.saitama-u.ac.jp
参考URL
